自动驾驶大模型技术前沿 通信与自动控制技术的融合研究综述
以Transformer为代表的大模型技术正深刻重塑自动驾驶(Autonomous Driving,AD)领域的研究范式。传统基于规则或单一模块化的自动驾驶系统,在面对长尾场景、复杂交互和不确定性环境时,常显乏力。而端到端自动驾驶大模型,通过海量多模态数据进行预训练,展现出强大的场景理解、决策规划和控制生成能力,为实现高阶自动驾驶提供了新的路径。本文旨在对自动驾驶大模型的关键技术进行调研,并重点剖析其在通信与自动控制层面的研究进展与挑战。
一、 自动驾驶大模型的核心架构与范式演进
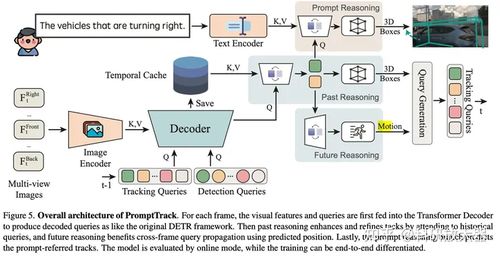
当前主流的自动驾驶大模型架构主要分为两类:1)以感知-决策-控制为脉络的模块化大模型,即在感知、预测、规划等关键模块中分别引入大模型提升性能;2)端到端(End-to-End)大模型,将原始传感器输入(如摄像头、激光雷达)直接映射为控制信号(如方向盘转角、油门/刹车)。后者因其更符合数据驱动原则和潜在的更高性能上限,成为近期研究热点。典型代表如Wayve的GAIA-1、特斯拉的FSD V12、毫末智行的DriveGPT等,它们通常基于视觉Transformer(ViT)或扩散模型(Diffusion Model)构建,能够生成逼真的未来场景并据此做出规划。
二、 通信技术在自动驾驶大模型中的关键角色
自动驾驶绝非单车智能的孤立问题,车与车(V2V)、车与路(V2I)、车与云(V2C)的协同通信是提升系统安全性、效率与智能水平的关键。在大模型时代,通信技术的研究重点发生了显著转变:
- 高带宽、低时延的数据共享:大模型的训练与协同推理依赖于海量、高质量、实时更新的多车多源数据。5G/5G-Advanced及未来的6G通信技术,为车辆间实时共享高维感知特征(如鸟瞰图BEV特征)、轨迹预测结果乃至大模型中间层激活值提供了可能,从而实现“群体智能”与协同感知。
- 模型参数的高效分发与更新:中心云可利用全局数据持续训练和优化大模型,并通过无线网络将更新后的模型参数或提示(Prompt)高效、安全地分发给边缘车辆(联邦学习范式)。这要求通信协议能支持大模型参数的稀疏化更新和差分隐私保护。
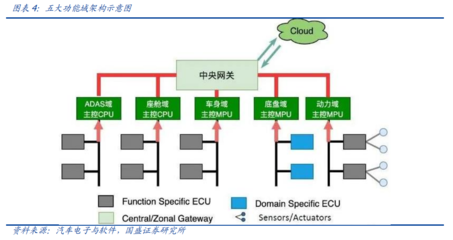
- 车路云一体化协同决策:路侧智能单元(RSU)配备的大模型可以对复杂路口进行全局优化调度,并通过通信链路将最优通行策略实时下发至车辆端模型,指导其微观行为。这构成了一个分层式的大模型决策系统。
三、 自动控制技术与大模型的深度融合
将大模型的输出转化为安全、平滑、舒适的车辆控制指令,是闭环中的最后且最关键一环。传统控制方法(如PID、MPC)与学习型控制(如模仿学习、强化学习)正在与大模型深度结合:
- 大模型作为高级决策器:大模型负责输出高层次的路径点序列或行为语义(如“在下一个路口左转”),而底层则由一个鲁棒性强的传统控制器(如模型预测控制MPC)负责轨迹跟踪与稳定控制。这种分层结构兼顾了智能与安全。
- 大模型直接生成控制信号:端到端大模型直接回归方向盘、油门和刹车的连续值。其挑战在于控制动作的平滑性、安全性以及对物理约束的满足。当前研究通过引入基于物理的损失函数、将控制信号离散化为词元(Token)融入语言模型、或利用扩散模型生成满足多重约束的最优控制序列来应对。
- 基于世界模型的强化学习控制:大模型可充当“世界模型”,预测自身动作在环境中的长期后果。智能体(控制器)在此世界模型中进行“想象”演练和策略优化(如Dreamer算法),从而学习到更安全、高效的驾驶策略,并大幅提升数据利用效率。
四、 挑战与未来展望
尽管前景广阔,自动驾驶大模型在通信与控制层面仍面临严峻挑战:
- 通信可靠性:在恶劣天气、隧道、城市峡谷等复杂信道环境下,如何保证关键模型数据与指令的可靠、低时延传输,是V2X通信必须解决的工程难题。
- 安全与合规性:大模型的“黑箱”特性使其决策过程难以解释,在发生事故时归责困难。如何构建可验证、符合交通法规且具备安全边界的大模型控制策略,是迈向商用的前提。
- 计算与能效:大模型推理耗能巨大,对车载计算平台构成压力。如何设计轻量化模型架构,并结合边缘计算与云计算进行任务协同分配,是工程落地的关键。
- 仿真与测试验证:构建高保真、可扩展的仿真环境,用于大规模测试和评估大模型在极端场景下的性能与安全性,已成为不可或缺的研发环节。
自动驾驶大模型将朝着多模态理解更精准、决策逻辑更可解释、车路云协同更紧密的方向发展。通信技术将不仅承担数据传输管道职能,更将演变为分布式神经网络的一部分;而自动控制则将更深地融入学习框架,形成从感知到执行的统一、智能、安全的“神经控制器”。这一融合进程,将持续推动自动驾驶技术迈向真正的L4/L5级无人化。
如若转载,请注明出处:http://www.huajian-china.com/product/51.html
更新时间:2026-06-19 07:28:50